
Enkel tilgang til havet – for alle
Blueye Robotics er et norsk undervannsteknologiselskap etablert i 2015. Våre røtter stammer fra Norges teknisk-naturvitenskapelige universitet (NTNU) og SINTEF Ocean. I dag er vi 18 heltidsansatte som spesialiserer seg på industridesign, elektronikk, software, robotikk, forretningsutvikling og markedsføring.
Med et utgangspunkt i forbrukermarkedet har våre grunnleggende prinsipper blitt tatt med på det kommersielle markedet. Noe som resulterer i robuste og brukervennlige verktøy.
Grunnsystemet – hvordan det hele henger sammen
Før vi går igjennom mer detaljert på hvordan vi tenker om design, er det nødvendig å gi deg en oversikt over hva ROV-systemet består av og hvordan det hele henger sammen.

Systemet består av en ROV, en kabel koblet til overflaten, og en kontrollenhet som kjører Blueye-appen. Blueye-appen gir en stabil tilkobling ROV-kameraet som sender en live videostrøm samt sensordata som samles inn under dykket.
Blueye-systemet fungerer i utgangspunktet på samme måte som andre undervanns ROV-er, med maskinvare og programvare som fungerer sammen. Noen avgjørende forskjeller er det dog mellom men det er avgjørende forskjeller som vi skal utforske videre.
"Føttene ned, hodet opp og øynene fremover" - slik forklarer vi designvalget
De tre Blueye ROV-modellene, Pioneer, Pro og X3, har alle samme formfaktor og er bygget på de samme designprinsippene. Pioneer var den første modellen som ble lansert tilbake i 2019, men mange år med utvikling ble gjennomført før våre første kunder mottok ROVen sin.
Formen på Blueye ROV-ene er ikke typisk for ROV-er generelt. Vanligvis er ROV-systemer boksformede eller mer ovale eller runde. Blueye ROV-en ligner mer på en stor fisk, og det er noen viktige designvalg bak det.
Hydrodynamisk og selvstabiliserende
Kameraet til Blueye ROVene er plassert på toppen, og de tyngre delene, for eksempel batterirøret i aluminium, er plassert nederst. Teknologien vår fungerer som menneskekroppen - hodet er på toppen, øynene våre ser fremover, og føttene er på bakken.
ROV-en har fire thrustere, to nøyaktig plassert i midten og de to andre bak. Sammen holder de et betydelig skille mellom oppdriftssenteret (COB) og tyngdepunktet (COG). En beslutning om å holde kostnadene nede førte til at vi bestemte oss for totalt fire thrustere. Ved å være veldig nøyaktige på plasseringen av disse endte vi opp med et selvstabiliserende ROV-design uten behov for "pitch and roll"-funksjoner.
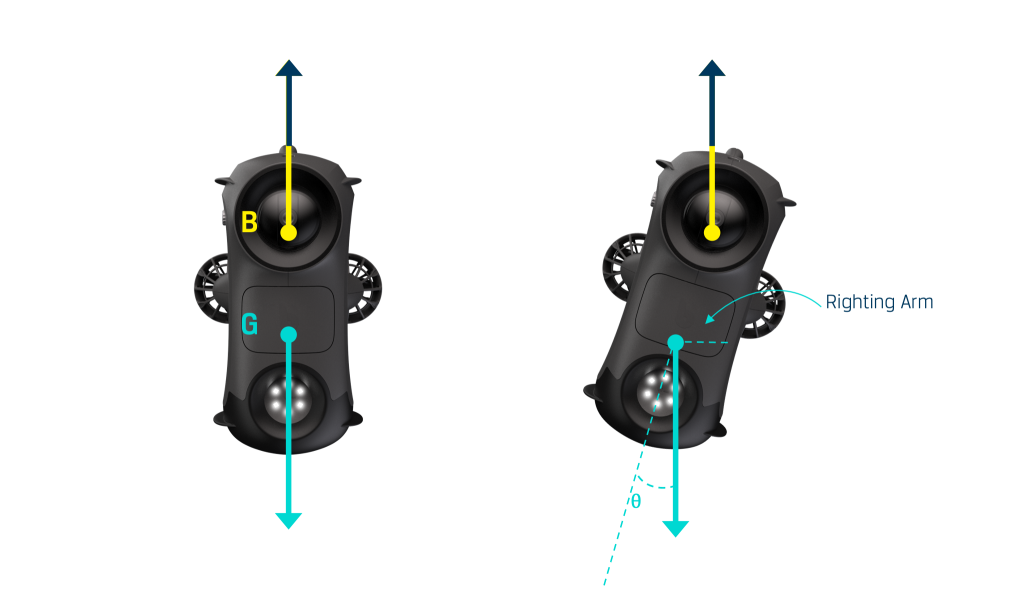
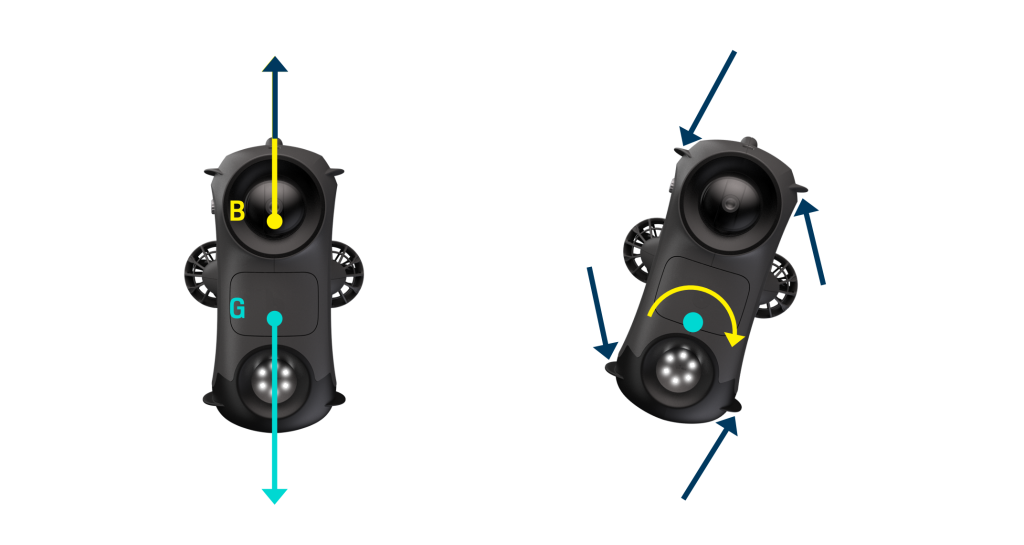
Det er mye lettere for operatøren å forholde seg til miljøet rundt ROV-en når du vet at kameraet og ROV-en alltid er i oppreist stilling.
- Rune Hansen, Lead Mechanical Engineer hos Blueye Robotics
En annen liten, men viktig detalj om designet, er "finnene" plassert på begge sider av ROV-en. Uten disse "finnene" vil ROV-en "svinge" fra side til side når en manøvrerer ROV-en oppover og nedover i vannsøylen. Vi hadde flere runder for å finne riktig form og vinkel, og til slutt endte vi opp med et design som kompenserte for den uønskede effekten. Slik sørger de for at dagens Blueye ROV-er elegant kommer seg opp og ned til havbunnen i en rett linje.
En annen detalj som er verd å nevne er valget om å bruke batterier fremfor strøm over kabel. Batterier muliggjør bruk av en tynn og fleksibel kabel som minimerer motstanden fra vannet under dykking. Koblingspunktet for kabelen inne i ROV-en er heller ikke en tilfeldighet, da det er nøye planlagt og plassert i midten, og ikke rett bak på ROV-en. Dette også for å redusere motstand fra vannet under dykking.
Blueye Smart Connector – konverterer avanserte sensorer til plug-and-play-systemer
Integrering av tredjepartsteknologi og verktøy i ROV-plattformen blir aktivert via en Blueye Smart Connector. Det er ikke nødvendig å laste ned drivere, oppdatere ROV-en eller sende ROV-en tilbake til oss for bare å legge til et tilbehør. Akkurat som datamaskinen din oppdager og kjører USB-tilkoblede enheter, vet Blueye ROV-en automatisk hva som er tilkoblet dronen via en Smart Connector. Våre Smart Connectorer har egne kretskort som også inkluderer metadata.
Det handler om å gjøre avansert teknologi enkel å bruke. Vi fjerner de manuelle konfigurasjonene som kompliserer oppsettet.
- Jonas Follesø, Chief Technology Officer hos Blueye Robotics

Metadataen lar operativsystemet til Blueye ROV-en (Blunux) starte de programvaremodulene som trengs for å støtte et bestemt utstyr basert på koblingsinformasjon. Dette helt uten konfigurasjon fra sluttbrukeren. På andre ROV-systemer vil operatører vanligvis måtte konfigurere COM-porter manuelt, angi statiske IP-adresser og installere systemdrivere for å aktivere et nytt eksternt tredjepartsutstyr. Dette slipper du ved å ta i bruk ROV-er fra Blueye.
Gammastråle "sniffer" og Oculus Multibeam sonar
Nylig leverte vi en Blueye X3-modell integrert med en Medusa Gammastråle-detektor til Det internasjonale atomenergibyrået (IAEA). IAEA har i oppgave å måle nivåene av radioaktivitet som lekket fra X-press Peal-skipet som tok fyr og sank i Indonesia i 2021.
Ved å integrere Medusa-sensoren i Blueye X3 kan IAEA-teamet lese strålingsnivåer direkte i Blueye-appen samtidig som de dykker. Det er ikke behov for eksterne programvarer da målingene enkelt registreres i Blueye-appen.

Den norske Kystvakten bestemte seg høsten 2022 for å utstyre hele flåten med Blueye X3 ROVer. I tiden siden de mottok ROV-ene har Kystvakten rapportert om flere vellykkede lete- og bergingsoppdrag. Den primære sensoren for denne leveransen var Oculus M750d multibeam sonar.
Disse undervanns ROV-ene kan dykke til større dybder enn Kystvaktens egne dykkere og kan nå lengre avstander raskere. Dette utvider Kystvaktens operasjonsradius og øker effektiviteten i utførelsen av Kystvaktens mange oppgaver.
- Torill Herland, kommandørkaptein og kommunikasjonsoffiser, Sjøforsvaret

App-programvare og bruk av veletablert teknologi
Blueye-appen kobler ROV-en, overflateenheten og kontrolleren sammen slik at operatøren kan styre ROV-en. Inspirert av luftdroner ble det klart fra starten at Blueye ROV-er skulle betjenes på samme enkle og etablerte måte.
Det er ikke bare fleksibiliteten til app-teknologien som førte oss ned denne veien. Det er like viktig at det mentale bildet førstegangsbrukeren får er at dette utstyret ser kjent ut og er lett å håndtere.
- Jonas Follesø, Chief Technology Officer hos Blueye Robotics
En stor fordel med app-teknologi er å være en del av et stort økosystem av apper. Det er enklere å integrere appene våre med 3-partsapper, og dataflyten går mye jevnere. Da COVID-19 stengte verden, koblet vi oss til Microsoft Teams på noen få dager – noe som muliggjorde fjerninspeksjon og digitale demonstrasjoner for klienter.
Xbox-kontrolleren
Selv om vi ønsker at brukere av Blueye skal gjenkjenne teknologien raskt, har det sine nedsider ved at vi også kan bli konfrontert med kommentarer om at systemet ser ut som "et leketøy".
Standardkontrolleren som tilbys med Blueye-systemet er en Xbox-kontroller. Vi kunne ha utviklet vår egen kontroller, men det ville gjort systemet dyrere og mindre fleksibelt for brukeren. Hvis kontrolleren går i stykker, er det enkelt å kjøpe en ny i den lokale elektrobutikken. Det samme gjelder enhetene som kjører Blueye-appen – du kan velge din foretrukkne tablet eller mobil, og oppgradere denne når du ønsker.
Når vi reflekterte over mengden utviklingstimer som allerede var lagt inn i spillkontrollere, bestemte vi oss for at det ikke var verdt å skreddersy noe som allerede er veldig anvendelig for systemet vårt. Hvis det er godt nok for millioner av gamere der ute som allerede er veldig kresne på utstyret, er det godt nok for Blueye.







