
Hva er en DVL og hvordan fungerer den?
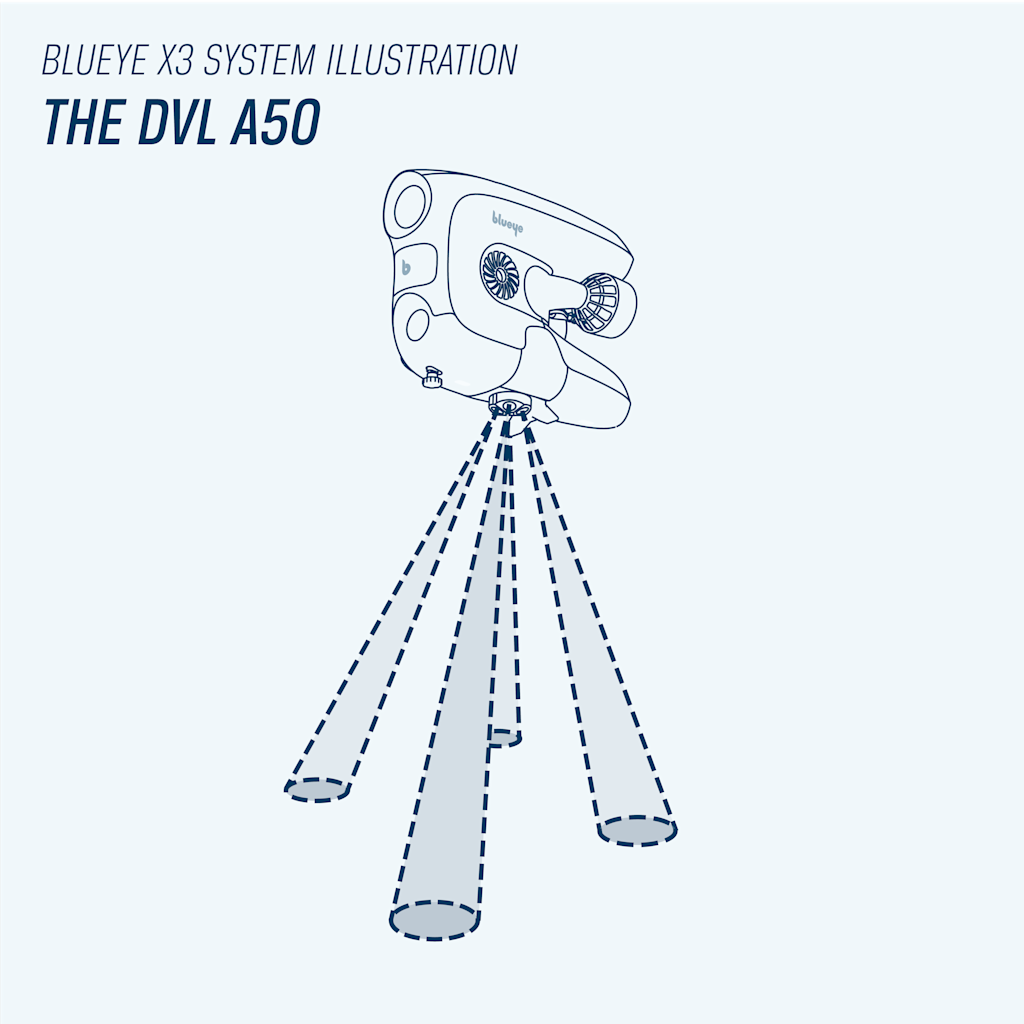
En Doppler Velocity Logger (DVL) er en sensor som måler ROVens hastighet og retning, ved å sende lydbølger mot havbunnen og analysere ekkoene. Se for deg sirenen til en ambulanse. Når den kommer imot deg vil du først høre en høyere tone enn når den har kjørt forbi, hvor sirenen blir mørkere. Dette er kjent som "Doppler-effekten". En DVL sender en rekke lydbølger fra typisk fire transpondere i en retning mot bunnen, med hver stråle peker i hver sin retning. Ved å sammenligne tonehøyden til hver av lydbølgene, kan DVLen estimere hastigheten farkosten beveger seg i forhold til havbunnen.
Når et startpunkt, en kompasskurs og hastigheten er kjent, er det også mulig å estimere posisjonen til kjøretøyet ved bruk av en "state observer". Denne prosessen er også kjent som "Dead reckoning".
DVL-er brukes i mange forskjellige applikasjoner. Militære dykkere bruker svømmebrett for å navigere nøyaktig under vann. Disse brettene har vanligvis et kompass og en dybdesensor for å hjelpe dykkeren med å navigere. Med en DVL montert i tillegg, kan dykkeren spore hvor langt hun har svømt, hvor hun er, og hvordan hun kan finne tilbake til utgangspunktet.En DVL kan også spore hvor hun har dykket og markere interessepunkter (POI) underveis.
Autonome undervannsfarkoster (AUV) kjører autonomt og er dermed ubemannede. På disse farkostene er DVLen en kritisk komponent for navigasjon, spesielt når globale posisjonsdata (som en GPS eller et akustisk posisjoneringssystem) ikke er tilgjengelig. DVL brukes vanligvis i kombinasjon med et globalt posisjoneringssystem og en IMU (Internal Measurement Unit) for å oppnå best mulig estimat av hastighet og posisjon.
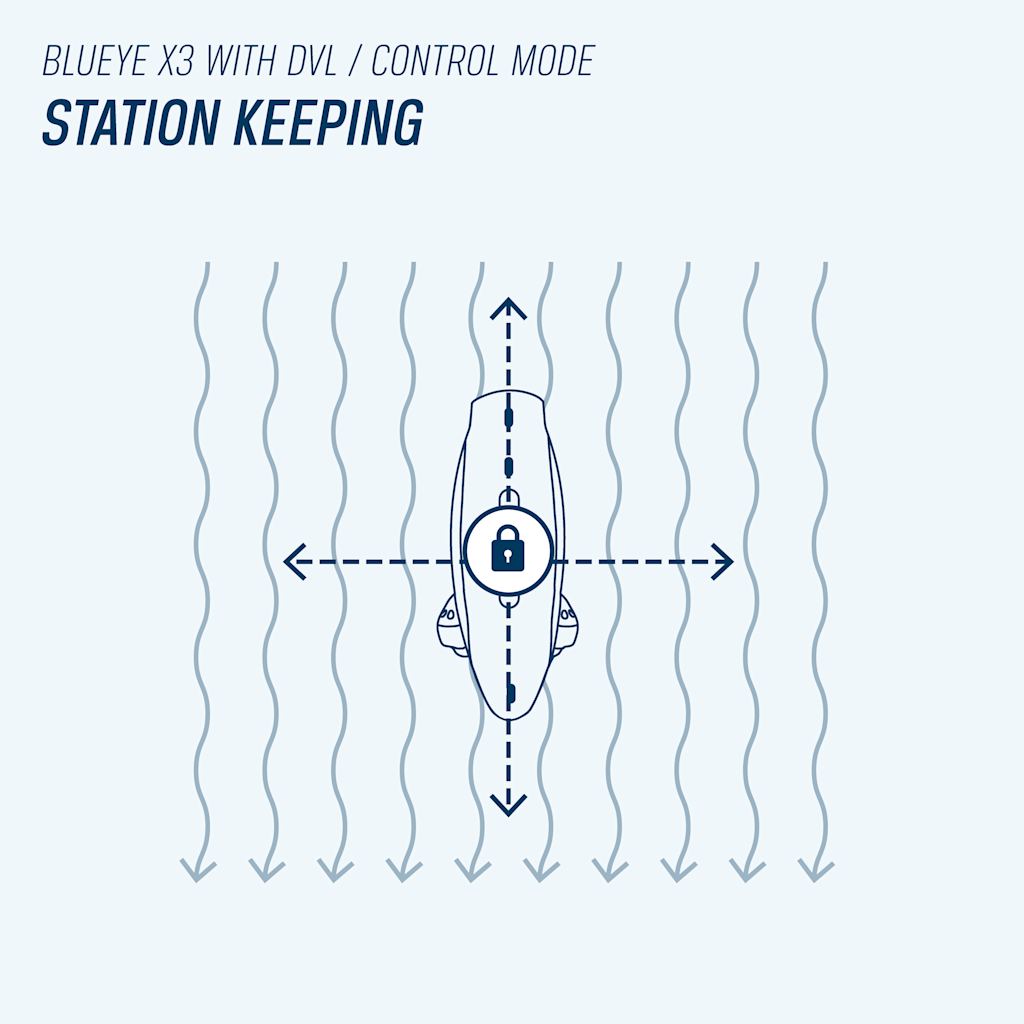
Station Keeping og Auto-altitude
Når posisjonen og hastigheten til dronen er kjent, er det mulig for kontrollsystemet å automatisk opprettholde en ønsket posisjon med en ny kontrollmodus kalt «station keeping».
Denne modusen forenkler inspeksjoner og overvåking ved å holde ROV-en låst til en posisjon ved å bruke havbunnen som referanse, selv når det er sterk strøm eller andre eksterne krefter som virker på kjøretøyet. Med ett trykk på kontrolleren, holder ROVen posisjonen av seg selv. Du kan også kjøre ROVen rundt som vanlig, og når du slipper spakene, låses den automatisk til den nye gjeldende posisjonen sømløst. Stasjonsholding vil redusere kompleksiteten ved å betjene ROV-en betraktelig og muliggjør at piloten kan fokusere på å samle data av høyere kvalitet.
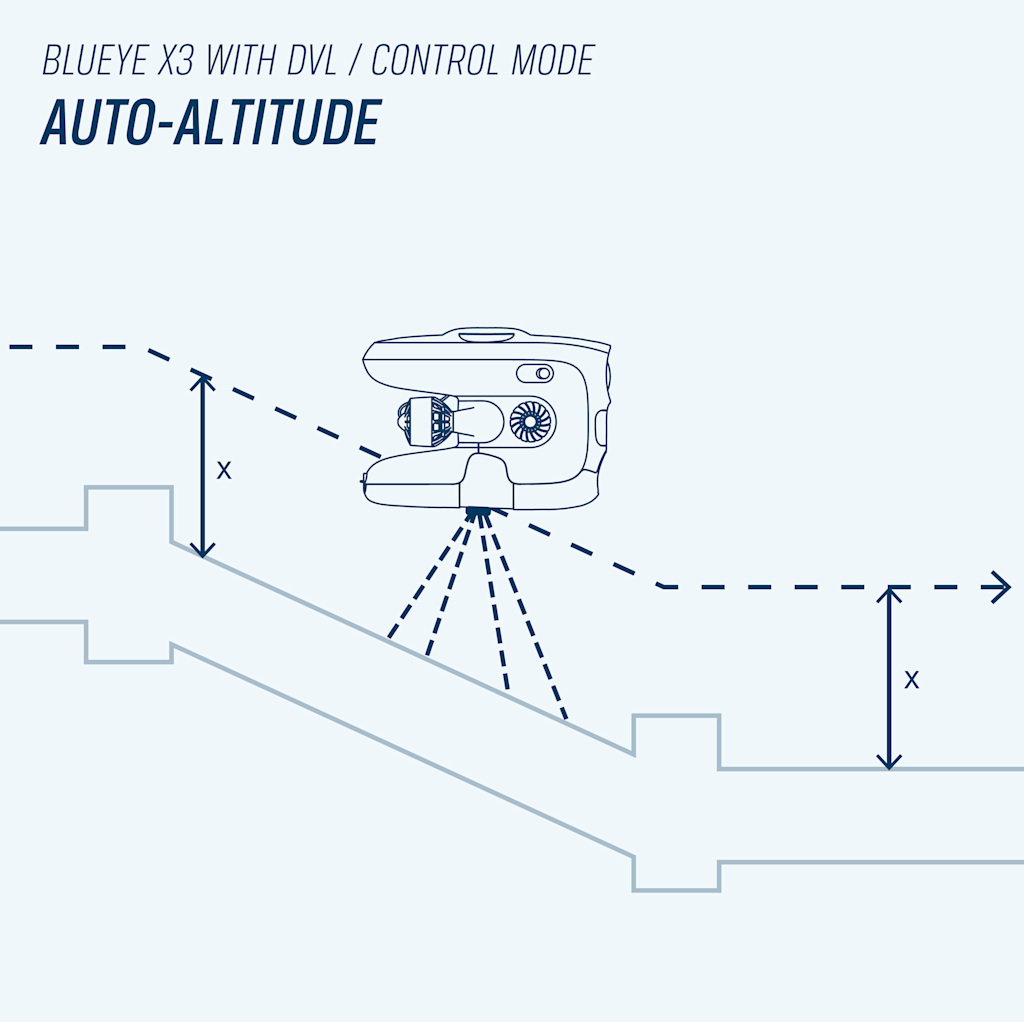
DVLen gir også en avstandsmåling til bunnen. Dette muliggjør en annen ny kontrollmodus kalt auto-altitude. Modusen fungerer nøyaktig som auto-depth og lar deg opprettholde ønsket avstand til havbunnen mens du dykker nedover en skråning f.eks. Dette er spesielt nyttig hvis du skulle følge en rørledning fra land og ned i dypet. Auto-altitude er også tilgjengelig med Ping Sonar Altimeter and Ecosounder fra Blue Robotics som et rimeligere alternativ dersom man kun trenger denne modusen.
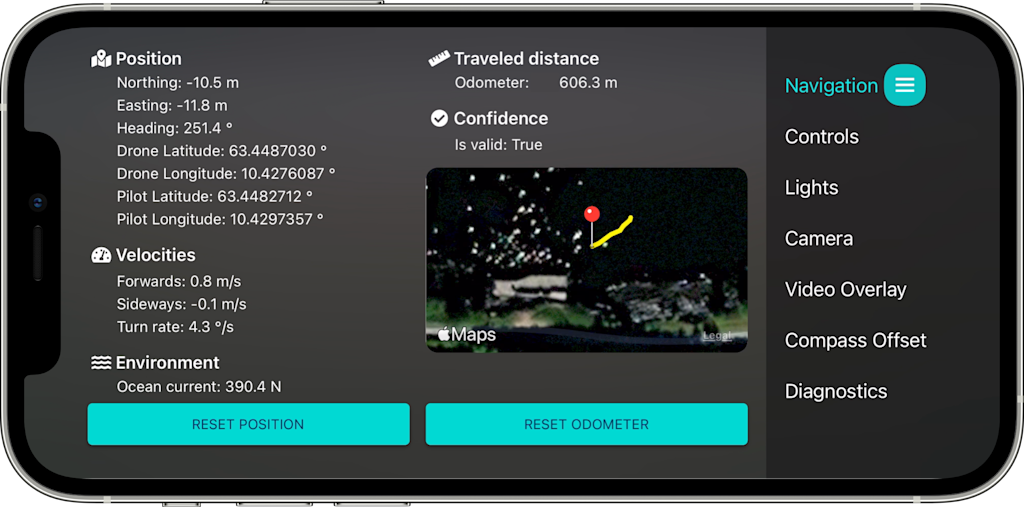
Siden vi integrerer alt eksternt utstyr med våre Blueye Smart Kontakter, vil ROV-en umiddelbart gjenkjenne om en DVL eller en Ping Sonar er tilkoblet. De nye funksjonene vil da vises i Blueye-appen automatisk. Det er ikke nødvendig for deg å gjøre noen form for konfigurasjon, som å sette IP addresser eller COM-porter. Du vil også kunne finne en ny fane under navigasjonsinnstillinger, med detaljert diagnostikk og et kart som viser plasseringen til både piloten og ROV-en. Dette er for å være sikker på at du har et godt utgangspunkt for slepesporet som skrives til dykkeloggen.
Vis inspeksjonen på et kart med geo-refererte bilder
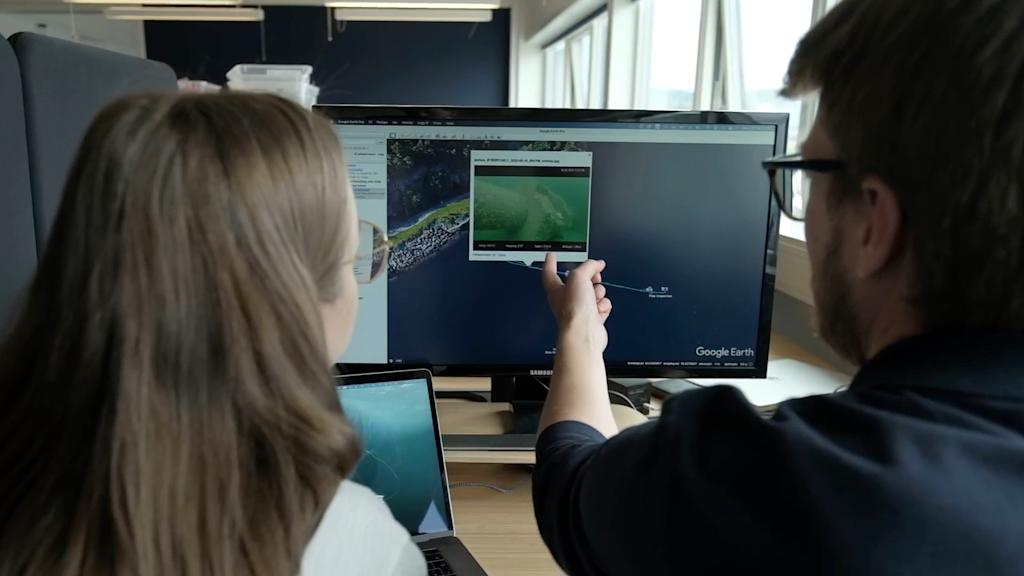
Slepesporet fra inspeksjonen kan enkelt trekkes ut fra dykkeloggen i en KML- eller en KMZ-fil og vises direkte i Google Earth eller et hvilket som helst annet GIS-verktøy du foretrekker. KML-formatet er en lettvekts XML-fil som holder posisjonsdataen til ROV-en sammen med POI-nåler fra der du endret videooverleggs-tittel og -undertittel. KMZ-filen har den samme informasjonen som KML-filen, men den lagrer også bildene som ble tatt under dykket, slik at du automatisk kan vise bildene på riktig sted på kartet. Disse posisjonsloggfilene forbedrer arbeidsflyten betydelig når du skal lage rapporten for inspeksjonen. Nå kan du umiddelbart se hvor funnene dine var på kartet og raskt få en god oversikt. Disse dykkesporene er også flotte å bruke hvis du ønsker å komme tilbake til et interessepunkt (POI), eller hvis du suksessivt utforsker et område. Du kan deretter laste spor fra forskjellige dykk inn i samme kart for å få en god visuell oversikt. Disse kartene kan også deles med kolleger eller tredjeparter.
Alle bilder tatt på ROV-en vil også bli georeferert automatisk, noe som betyr at du kan åpne bildet i Fotobiblioteket ditt på telefonen og se plasseringen der bildet ble tatt direkte etter at bildene er blitt importert.
Situasjoner der en DVL vil drastisk forenkle ROV-operasjonen
- Observasjonsoppgaver der ROV-en må vente på ett sted for at en hendelse skal skje.
- Observere dykkere under en krevende operasjon.
- Overvåking av fiskens helse under en avlusingsoperasjon.
- Inspeksjoner av større eller lengre konstruksjoner. Vit hvor bildene ble tatt med automatisk geotagging. – I områder med strøm vil station keeping frigjøre den mentale belastningen ved å manuelt kompensere for strømmen. Dette øker kvaliteten på dataene som samles inn og sjansene for å lykkes med jobben.
- Sterk strøm og utfordrende miljø. Når du har sluppet stokkene, kan du enkelt ta en liten pause eller gi kontrollen til noen ved siden av deg.
- Søk av områder, vite hvor du er og hvor du har vært.
- Generelt å hjelpe ROV-piloten til å forstå hvor farkosten befinner seg til enhver tid.
- Inspeksjoner hvor du trenger å vite hvor bildene er tatt.
Vi har testet DVLen inne i en fiskemerd. Da ROV-en nærmet seg nettet med 6-8 meter var DVLen, overraskende nok, i stand til å gjenkjenne nettet og låste posisjonen i forhold til nettet, i stedet for havbunnen. Dette åpner for bruk av en DVL i fiskemerder også. - Andreas Viggen, Senior Software Engineer
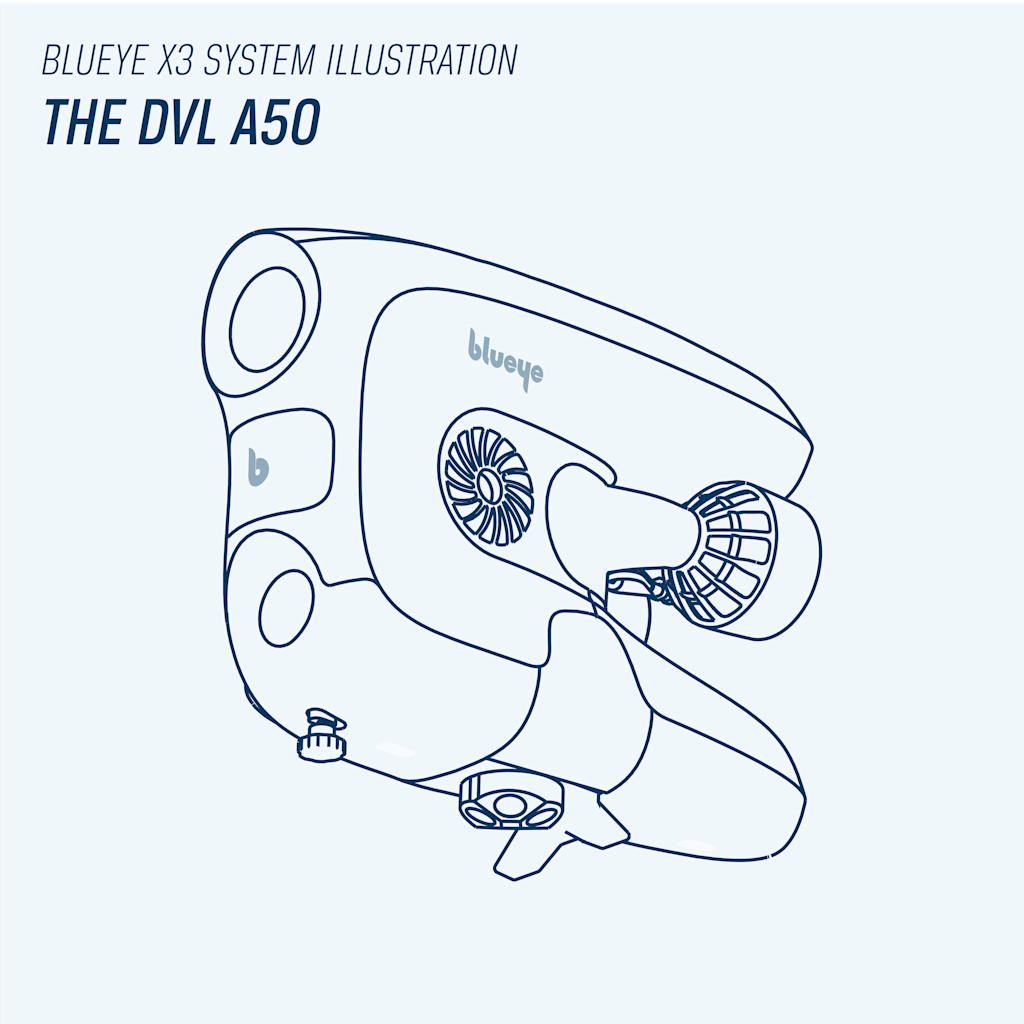
Verdens minste DVL – utviklet av det norske selskapet Water Linked
Tradisjonelle DVL-er er vanligvis store, klumpete og vanskelige å bruke på mindre ROV-er. Det er spesielt størrelsen og ytelsen som gjør Water Linked DVL A50 enheten unik, i tillegg til den relativt lave prisen. Størrelsen er viktig for å beholde den gode manøvrerbarheten til blueye ROV-ene. En større enhet vil trenge ekstra oppdrift, noe som igjen vil føre til ekstra motstand i vannet. Den flate formfaktoren er også veldig unik, og gjør det enkelt å montere DVLen under Blueye X3-modellen.

DVLen fra Water Linked er dypt integrert både i programvaren og maskinvaren til Blueye X3. Integrasjonen lar deg enkelt koble sensoren til X3en ved å bruke en Blueye Smart Connector som plugges rett i en av de tre guest-port-ene. Blunux-operativsystemet vil starters så de nødvendige driverne automatisk og sender signalene til kontrollsystemet og Blueye-appen som viser de nye funksjonene som nå er tilgjengelig.
Dette er akkurat det vi prøver å gjøre; vi tar de vanskelige oppgavene og finner de riktige sensorene, som kan høres veldig tekniske ut, og gjør dem super-brukervennlige i systemet vårt. Du kan plukke opp en hvilken som helst luftdrone, få dem opp i luften, slippe stikkene, så blir den der. Dette er hva vi har nå også gjort mulig for mini-ROV-er ved å integrere en DVL. - Andreas Viggen, Senior Software Engineer
Eksempelfil for positionsdata i KMZ (Google Earth)
En eksempelfil for posisjonsdata i KMZ. Filen kan åpnes i Google Earth Pro.- Format
- application/zip
- File size
- 3.56 MB
Eksempelfil for posisjonsdata i KML
Eksempelfil for posisjonsdata som kan åpnes i Google My Maps, eller hvilket som helst annet GIS verktøy- Format
- application/vnd.google-earth.kml+xml
- File size
- 0.27 MB